 |
PandaRoot
|
|
PandaRoot
|
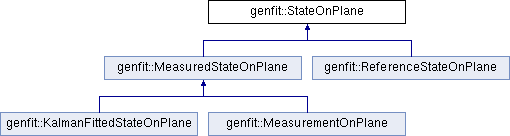
A state with arbitrary dimension defined in a DetPlane. More...
#include <StateOnPlane.h>
Public Member Functions | |
| StateOnPlane (const AbsTrackRep *rep=nullptr) | |
| StateOnPlane (const TVectorD &state, const SharedPlanePtr &plane, const AbsTrackRep *rep) | |
| state is defined by the TrackReps parameterization More... | |
| StateOnPlane (const TVectorD &state, const SharedPlanePtr &plane, const AbsTrackRep *rep, const TVectorD &auxInfo) | |
| StateOnPlane & | operator= (StateOnPlane other) |
| void | swap (StateOnPlane &other) |
| virtual | ~StateOnPlane () |
| const TVectorD & | getState () const |
| TVectorD & | getState () |
| const TVectorD & | getAuxInfo () const |
| TVectorD & | getAuxInfo () |
| const SharedPlanePtr & | getPlane () const |
| const AbsTrackRep * | getRep () const |
| void | setState (const TVectorD &state) |
| void | setPlane (const SharedPlanePtr &plane) |
| void | setStatePlane (const TVectorD &state, const SharedPlanePtr &plane) |
| void | setAuxInfo (const TVectorD &auxInfo) |
| void | setRep (const AbsTrackRep *rep) |
| double | extrapolateToPlane (const SharedPlanePtr &plane, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToLine (const TVector3 &linePoint, const TVector3 &lineDirection, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToPoint (const TVector3 &point, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToPoint (const TVector3 &point, const TMatrixDSym &G, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToCylinder (double radius, const TVector3 &linePoint=TVector3(0., 0., 0.), const TVector3 &lineDirection=TVector3(0., 0., 1.), bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToSphere (double radius, const TVector3 &point=TVector3(0., 0., 0.), bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateBy (double step, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToMeasurement (const AbsMeasurement *measurement, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| TVector3 | getPos () const |
| TVector3 | getMom () const |
| TVector3 | getDir () const |
| void | getPosMom (TVector3 &pos, TVector3 &mom) const |
| void | getPosDir (TVector3 &pos, TVector3 &dir) const |
| TVectorD | get6DState () const |
| double | getMomMag () const |
| int | getPDG () const |
| double | getCharge () const |
| double | getQop () const |
| double | getMass () const |
| double | getTime () const |
| void | setPosMom (const TVector3 &pos, const TVector3 &mom) |
| void | setPosMom (const TVectorD &state6) |
| void | setChargeSign (double charge) |
| void | setQop (double qop) |
| void | setTime (double time) |
| virtual void | Print (Option_t *option="") const |
Protected Attributes | |
| TVectorD | state_ |
| TVectorD | auxInfo_ |
| SharedPlanePtr | sharedPlane_ |
A state with arbitrary dimension defined in a DetPlane.
The dimension and meaning of the state_ vector are defined by the track parameterization of the #rep_. sharedPlane_ is a shared_pointer, the ownership over that plane is shared between all StateOnPlane objects defined in that plane. The definition of the state is bound to the TrackRep #rep_. Therefore, the StateOnPlane contains a pointer to a AbsTrackRep. It will provide functionality to extrapolate it and translate the state it into cartesian coordinates. Shortcuts to all functions of the AbsTrackRep which use this StateOnPlane are also provided here.
Definition at line 44 of file StateOnPlane.h.
|
inline |
Definition at line 156 of file StateOnPlane.h.
References genfit::AbsTrackRep::getDim(), and state_.
|
inline |
state is defined by the TrackReps parameterization
Definition at line 163 of file StateOnPlane.h.
References sharedPlane_.
|
inline |
|
inlinevirtual |
Definition at line 55 of file StateOnPlane.h.
|
inline |
Definition at line 112 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateBy().
|
inline |
Definition at line 103 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToCylinder().
|
inline |
Definition at line 89 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToLine().
|
inline |
Definition at line 113 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToMeasurement().
|
inline |
Definition at line 85 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToPlane().
|
inline |
Definition at line 93 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToPoint().
|
inline |
Definition at line 97 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToPoint().
|
inline |
Definition at line 108 of file StateOnPlane.h.
References genfit::AbsTrackRep::extrapolateToSphere().
|
inline |
Definition at line 123 of file StateOnPlane.h.
References genfit::AbsTrackRep::get6DState().
|
inline |
|
inline |
|
inline |
Definition at line 126 of file StateOnPlane.h.
References genfit::AbsTrackRep::getCharge().
|
inline |
Definition at line 120 of file StateOnPlane.h.
References genfit::AbsTrackRep::getDir().
|
inline |
Definition at line 128 of file StateOnPlane.h.
References genfit::AbsTrackRep::getMass().
|
inline |
Definition at line 119 of file StateOnPlane.h.
References genfit::AbsTrackRep::getMom().
|
inline |
Definition at line 124 of file StateOnPlane.h.
References genfit::AbsTrackRep::getMomMag().
|
inline |
|
inline |
|
inline |
Definition at line 118 of file StateOnPlane.h.
References genfit::AbsTrackRep::getPos().
|
inline |
Definition at line 122 of file StateOnPlane.h.
References genfit::AbsTrackRep::getPosDir().
|
inline |
Definition at line 121 of file StateOnPlane.h.
References genfit::AbsTrackRep::getPosMom().
|
inline |
Definition at line 127 of file StateOnPlane.h.
References genfit::AbsTrackRep::getQop().
|
inline |
Definition at line 62 of file StateOnPlane.h.
Referenced by genfit::MeasuredStateOnPlane::get6DCov(), genfit::MeasuredStateOnPlane::get6DStateCov(), genfit::MeasuredStateOnPlane::getMomVar(), genfit::MeasuredStateOnPlane::getPosMomCov(), genfit::MeasuredStateOnPlane::setPosMomCov(), and genfit::MeasuredStateOnPlane::setPosMomErr().
|
inline |
Definition at line 57 of file StateOnPlane.h.
References state_.
Referenced by genfit::RKTrackRep::getQop(), and genfit::RKTrackRep::setQop().
|
inline |
|
inline |
Definition at line 129 of file StateOnPlane.h.
References genfit::AbsTrackRep::getTime().
|
inline |
|
virtual |
Reimplemented in genfit::ReferenceStateOnPlane, genfit::MeasuredStateOnPlane, and genfit::MeasurementOnPlane.
Referenced by setTime().
|
inline |
|
inline |
Definition at line 133 of file StateOnPlane.h.
References genfit::AbsTrackRep::setChargeSign().
|
inline |
|
inline |
Definition at line 131 of file StateOnPlane.h.
References genfit::AbsTrackRep::setPosMom().
|
inline |
Definition at line 132 of file StateOnPlane.h.
References genfit::AbsTrackRep::setPosMom().
|
inline |
Definition at line 134 of file StateOnPlane.h.
References genfit::AbsTrackRep::setQop().
|
inline |
Definition at line 82 of file StateOnPlane.h.
|
inline |
Definition at line 64 of file StateOnPlane.h.
References state_.
Referenced by genfit::MeasuredStateOnPlane::setStateCov().
|
inline |
Definition at line 71 of file StateOnPlane.h.
References sharedPlane_, and state_.
Referenced by genfit::MeasuredStateOnPlane::setStateCovPlane().
|
inline |
Definition at line 135 of file StateOnPlane.h.
References Print(), and genfit::AbsTrackRep::setTime().
|
inline |
Definition at line 182 of file StateOnPlane.h.
References auxInfo_, sharedPlane_, and state_.
Referenced by operator=(), and genfit::MeasuredStateOnPlane::swap().
|
protected |
Definition at line 141 of file StateOnPlane.h.
Referenced by getAuxInfo(), setAuxInfo(), and swap().
|
protected |
Definition at line 142 of file StateOnPlane.h.
Referenced by getPlane(), setPlane(), setStatePlane(), StateOnPlane(), and swap().
|
protected |
Definition at line 140 of file StateOnPlane.h.
Referenced by getState(), setState(), setStatePlane(), StateOnPlane(), and swap().
 1.8.13
1.8.13